
37 - Concurrency#
Concurrency can occur at four levels:
Machine instruction level
High-level language statement level
Unit/Subprogram level
Program level
Because there are no langauge issues at the instruction- and program-level concurrency, they are not discussed in this class.
Subprogram-Level Concurrency#
Categories of concurrency:
Physical concurrency: Multiple independent processors (multiple threads of control)
Logical concurrency: The appearance of physical concurrency is presented by time-sharing one processor
A thread of control in a program is the sequnce of program points reached as control flows through the program.
A program designed to have more than one thread of control is said to be multi-threaded.
Motivations for the Use of Concurrency#
Multiprocessor computers capable of physical concurrency are now widely used
Even if a machine has just one processor, a program written to use concurrent execution can be faster than the same program written for nonconcurrent execution
Many real-world situations involve concurrency. A different way of designing software can be very useful
Many program applications are now spread over multiple machines, either locally or over a network
Task Synchronization#
Cooperation: Task A must wait for task B to complete some specific activity before task A can continue its execution (e.g. the producer-consumer problem).
Competition: Two or more tasks must use some resource that cannot be simultaneously used (e.g. a shared counter).
Competition is usually provided by mutually exclusive access (approached are discussed later)
Task A: \(\text{TOTAL} = \text{TOTAL} + 1\)
Task B: \(\text{TOTAL} = 2 * \text{TOTAL}\)

Depending on order, there could be four different results
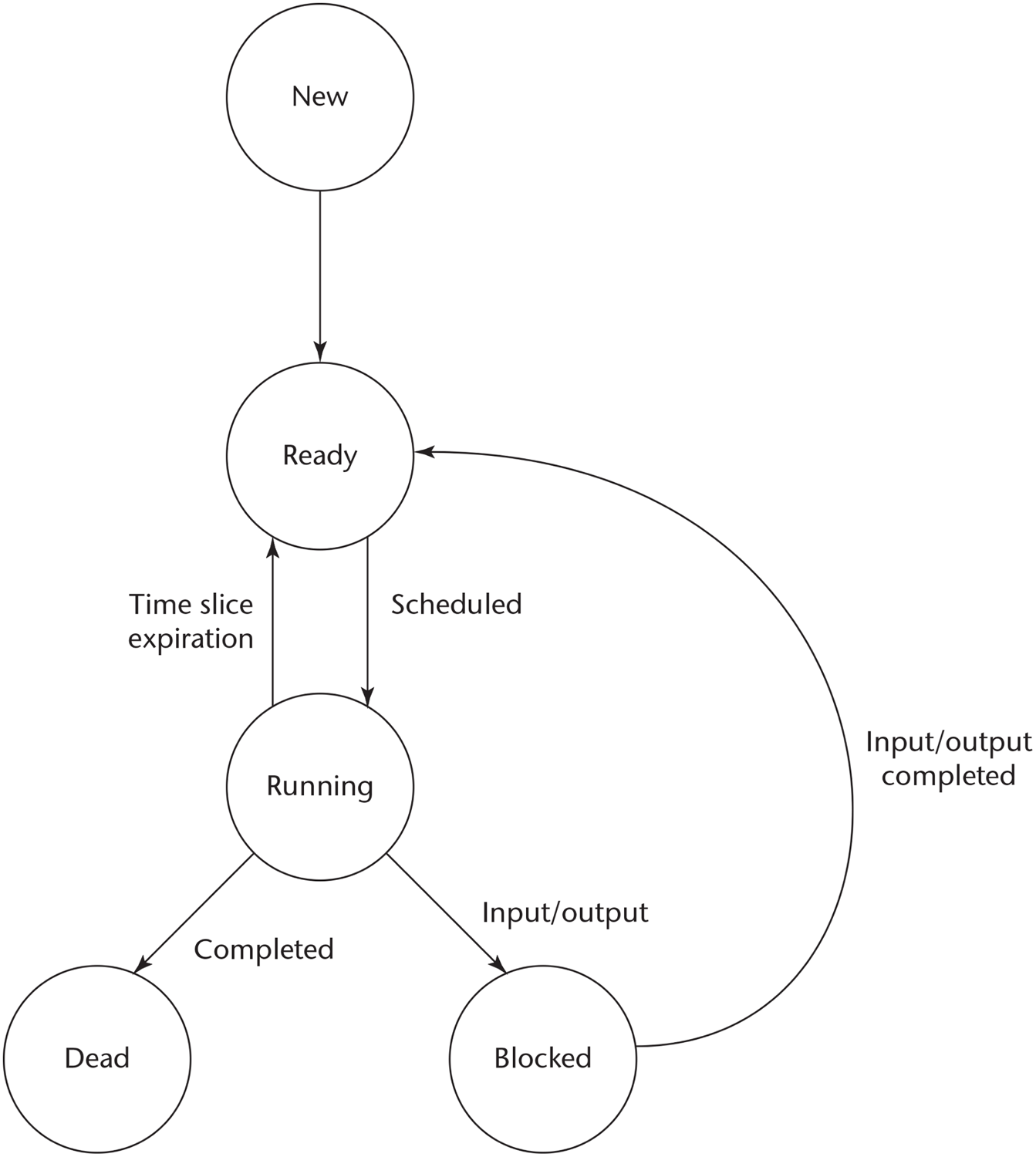
Task Execution States#
New - created but not yet started
Ready - ready to run but not currently running (no available processor)
Running
Blocked - has been running, but cannot now continue (usually waiting for some event to occur)
Dead - no longer active in any sense
Liveness and Deadlock#
Liveness is a characteristic that a program unit may or may not have.
In sequential code, it means the unit will eventually complete its execution
In a concurrent environment, a task can easily lose its liveness
If all tasks in a concurrent environment lose their liveness, it is called deadlock.
Semaphores#
A semaphore is a data structure consisting of a counter and a queue for storing task descriptors.
A task descriptor is a data structure that stores all of the relevant information about the execution state of the task
Semaphores only have two operations: wait and release (originally called P and V by Dijkstra).
Semaphores can be used to provide both competition and cooperation synchronization.
Cooperation Synchronization with Semaphores#
Example: A shared buffer.
The buffer is implemented as an ADT with the operations
DEPOSITandFETCHas the only ways to access the bufferUse two semaphores for cooperation:
emptyspotsandfullspotsThe semaphore counters are used to store the numbers of empty spots and full spots in the buffer
DEPOSIT must first check emptyspots to see if there is any room in the buffer.
If there is room, the counter of
emptyspotsis decremented and the value is insertedIf there is no room, the caller is stored in the queue of
emptyspotsWhen
DEPOSITis finished, it must increment the counter offullspots
FETCH must first check fullspots to see if there is a value.
If there is a full spot, the counter of
fullspotsis decremented and the value is removedIf there are no values in the buffer, the caller must be placed in the queue of
fullspotsWhen
FETCHis finished, it increments the counter ofemptyspots
The operations of FETCH and DEPOSIT on the semaphores are accomplished through two semaphore operations named wait and release.
Wait and Release Operations#
wait (aSemaphore)
if aSemaphore's counter > 0 then
decrement aSemaphore's counter
else
put the caller in aSemaphore's queue
attempt to transfer control to a ready task
end
release (aSemaphore)
if aSemaphore's queue is empty then
increment aSemaphore's counter
else
move one task from aSemaphore's queue to the ready queue
end
Producer and Consumer Tasks#
semaphore fullspots, emptyspots;
fullstops.count = 0;
emptyspots.count = BUFLEN;
task producer;
loop
-- produce VALUE –-
wait (emptyspots); {wait for space}
DEPOSIT(VALUE);
release(fullspots); {increase filled}
end loop;
end producer;
task consumer;
loop
wait (fullspots);{wait till not empty}
FETCH(VALUE);
release(emptyspots); {increase empty}
-- consume VALUE –-
end loop;
end consumer;
Competition Synchronization#
A third semaphore, named access, is used to control access (competition synchronization).
The counter of
accesswill only have the values0and1Such a semaphore is called a binary semaphore
Note that wait and release must be atomic.
Producer Code#
semaphore access, fullspots, emptyspots;
access.count = 1;
fullstops.count = 0;
emptyspots.count = BUFLEN;
task producer;
loop
-- produce VALUE –-
wait(emptyspots); {wait for space}
wait(access); {wait for access}
DEPOSIT(VALUE);
release(access); {relinquish access}
release(fullspots); {increase filled}
end loop;
end producer;
Consumer Code#
task consumer;
loop
wait(fullspots);{wait till not empty}
wait(access); {wait for access}
FETCH(VALUE);
release(access); {relinquish access}
release(emptyspots); {increase empty}
-- consume VALUE –-
end loop;
end consumer;
Evaluation#
Misuse of semaphores can cause failures in cooperation synchronization (e.g. the buffer will overflow if the wait of fullspots is left out).
Misuse of semaphores can cause failures in competition synchronization (e.g. the program will deadlock if the release of access is left out).
Monitors#
The idea: encapsulate the shared data and its operations to restrict access.
A monitor is an abstract data type for shared data.
They are used in Ada, C#, and Java.
Competition Synchronization#
Shared data is resident in the monitor (rather than in the client units).
All access is resident in the monitor
Monitor implementation guarantees synchronized access by allowing only one access at a time
Calls to monitor procedures are implicitly queued if the monitor is busy at the time of the call
Cooperation Synchronization#
Cooperation between processes is still a programming task.
The programmer must guarantee that a shared buffer does not experience overflow or underflow

Evaluation#
A better way to provide competition synchronization than semaphores
Support for cooperation synchronization is very similar as with semaphores, so it has the same problems
Semaphores can be used to implement monitors
Monitors can be used to implement semaphores
Message Passing#
Message passing is a general model for concurrency.
It can model both semaphores and monitors
It is both cooperation and competition synchronizations
Central idea: Task communication is like seeing a doctor. Most of the time, she waits for you or you wait for her, but when you are both ready, you rendezvous.
Rendezvous#
To support concurrent tasks with message passing, a language needs:
A mechanism to allow a task to indicate when it is willing to accept messages
A way to remember who is waiting to have its message accepted and some “fair” way of choosing the next message
When a sender’s task message is accepted by a receiver task, the actual message transmission is called a rendezvous.